(172b) Systematic Design of Active Constraint Switching Using Selectors
AIChE Annual Meeting
2020
2020 Virtual AIChE Annual Meeting
Computing and Systems Technology Division
Advances in Process Control
Monday, November 16, 2020 - 8:15am to 8:30am
To address this gap, in this talk we present a systematic design procedure using selectors for switching between different controllers. The proposed framework does not need detailed process models, nor process knowledge. In particular, we study the use of selectors for active constraint switching in the context of economic optimal operation.
Recently, there is an increasing interest in achieving optimal operation without the need to solve numerical optimization problems. Here, the main idea is to convert the optimization problem into a feedback control problem, thereby achieving optimal operation using simple feedback control structures [2][3]. The economic objectives can be translated into control objectives by controlling (in this order):
- The active constraints at its limit,
- For the remaining unconstrained degrees of freedom, control self-optimizing controlled variables, e.g. the steady-state cost gradient to zero.
It is then evident, that the active constraint regions play an important role in designing a feedback optimizing control structure, since this determines “what to controlâ€. When the set of active constraints changes as a function of disturbance, then this requires a change in the controlled variables and reconfiguration of the control loops, and possible identify different self-optimizing variables for each active constraint region.
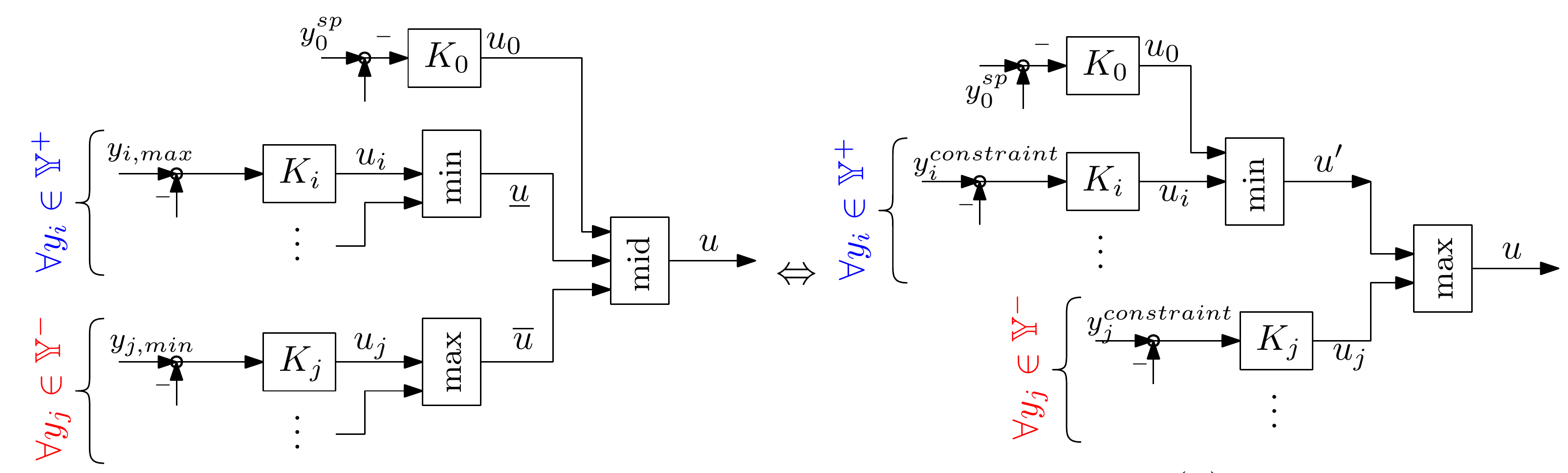
The active constraints may be on the controlled variables (CV), or on the manipulated variables (MV). Therefore, optimal operation may involve either CV-CV switching, MV-MV switching, or CV-MV switching. Here, we focus on the use of selector blocks for CV-CV and CV-MV switching. More precisely, we state under what conditions is the switching between different CV constraints using a given MV feasible and optimal. Different illustrative example will be used to demonstrate the proposed framework. ´
References
[1] Shinskey, F. G. Process control systems: application, design, and tuning; McGraw-Hill New York, 1996; Vol. 4.
[2] Morari, M.; Arkun, Y.; Stephanopoulos, G. Studies in the synthesis of control structures for chemical processes: Part I: Formulation of the problem. Process decomposition and the classification of the control tasks. Analysis of the optimizing control structures. AIChE Journal 1980, 26, 220-232.
[3] Skogestad, S. Plantwide control: the search for the self-optimizing control structure. Journal of process control 2000, 10, 487-507.