
(20h) Controlled Crack Propagation in Wireless Mxene Strain Sensor with High Sensitivity and Designated Working Windows for Soft Robots
AIChE Annual Meeting
2020
2020 Virtual AIChE Annual Meeting
Materials Engineering and Sciences Division
Materials for Electronics, Lighting, and Light-Matter Interactions
Monday, November 16, 2020 - 9:45am to 10:00am
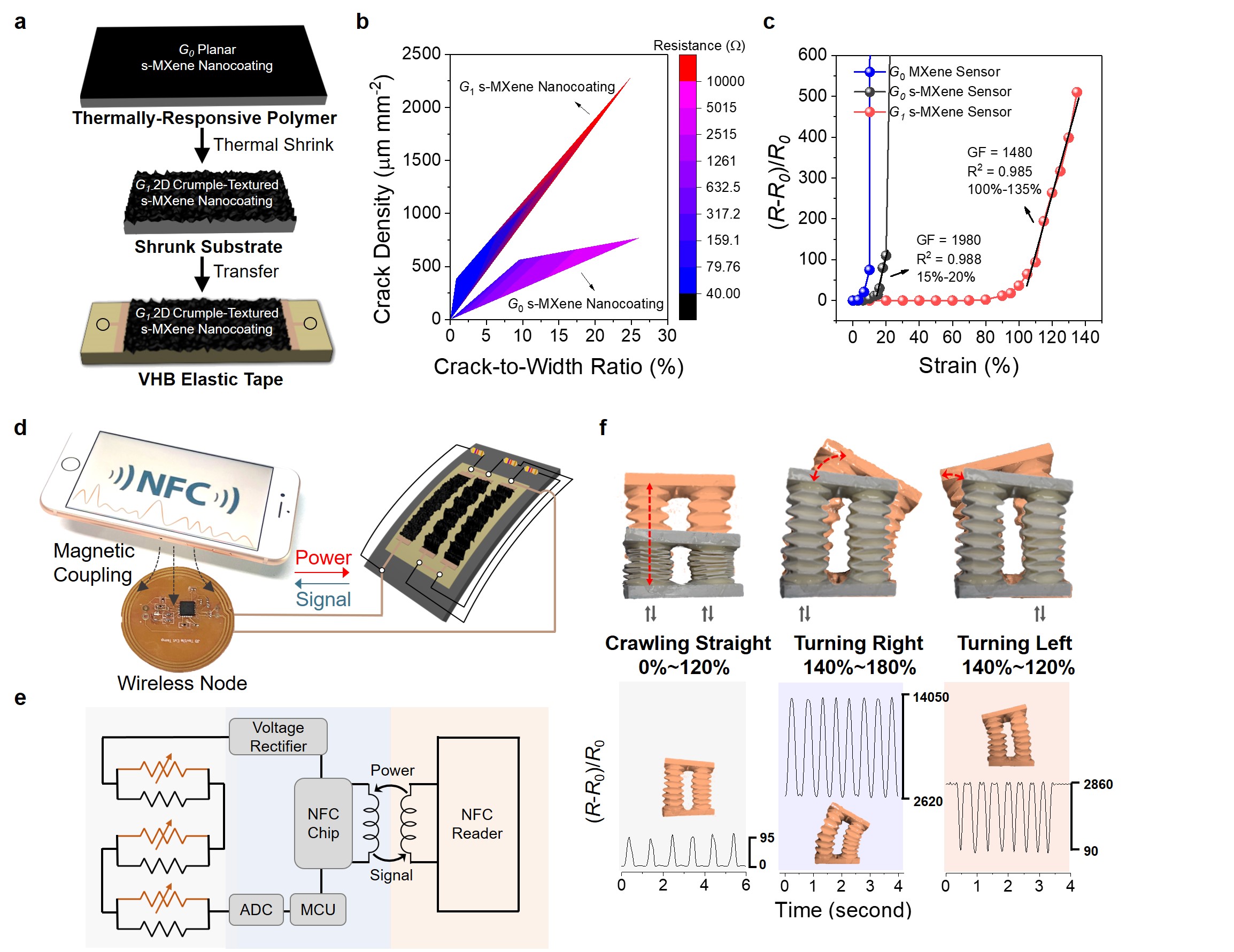
Piezoresistive strain sensor with high sensitivity, user-designated working windows, and wireless signal transmission is highly desired for real-time monitoring of emerging multi-degree-of-freedom soft robots. Several continual challenges await to be addressed for the required strain sensors. First, soft robots normally work under large body deformations and require the strain sensors with high sensitivity (gauge factor > 100) to monitor the robotic actuations at large strains (> 100%). Second, the high-sensitivity working window(s) of strain sensors is required to be tuned to meet the strain ranges of robotic deformations. Third, for complex actuations of soft robots, multiple strain sensors are often needed for picturing the entire motions, thus increasing the capacity loads of data processing and consuming more energy. To address these challenges, we develop various hierarchical morphologies on the piezoresistive Ti3C2Tx MXene layer to control the propagation of in-plane cracks under strains, endowing the resulting sensor with high sensitivity (gauge factor > 800) and controllable working window (from 130% to > 900%). Furthermore, by assembling multiple MXene sensors, we develop strain sensing modules that simultaneously achieve ultrahigh sensitivity (gauge factor ≥ 14,000) within user-designated linear working windows (covering 100% strain range). The sensor modules are also capable of collectively monitoring multi-segment robotic actuations in a single database channel, largely reducing the data processing loading for real-time sensing. We finally integrate the MXene sensor modules with the near-field communication technologies to establish the wireless, battery-free sensing systems to monitor the complex actuations of various soft robots (origami robots, soft hand/leg exoskeletons).
Checkout
This paper has an Extended Abstract file available; you must purchase the conference proceedings to access it.
Do you already own this?
Log In for instructions on accessing this content.
Pricing
Individuals
| AIChE Pro Members | $150.00 |
| AIChE Emeritus Members | $105.00 |
| AIChE Graduate Student Members | Free |
| AIChE Undergraduate Student Members | Free |
| AIChE Explorer Members | $225.00 |
| Non-Members | $225.00 |