(457d) Integrated Scheduling and Control Formulation for Processes Controlled By Nonlinear MPC Systems
AIChE Annual Meeting
2024
2024 AIChE Annual Meeting
Computing and Systems Technology Division
10B: Predictive Control and Optimization
Wednesday, October 30, 2024 - 8:48am to 9:04am
A number of integrated scheduling and control formulations have been proposed in recent years [5, 6, 7]. They focus particularly on processes controlled by linear model predictive control (LMPC) due to its popularity [8] in the chemical industry. Processes controlled by nonlinear model predictive control (NMPC) within the context of integrated scheduling and control have, until now, received scant attention, making them the focus of this study. NMPC finds application in highly nonlinear processes, or mildly nonlinear but with a large operating region [9].
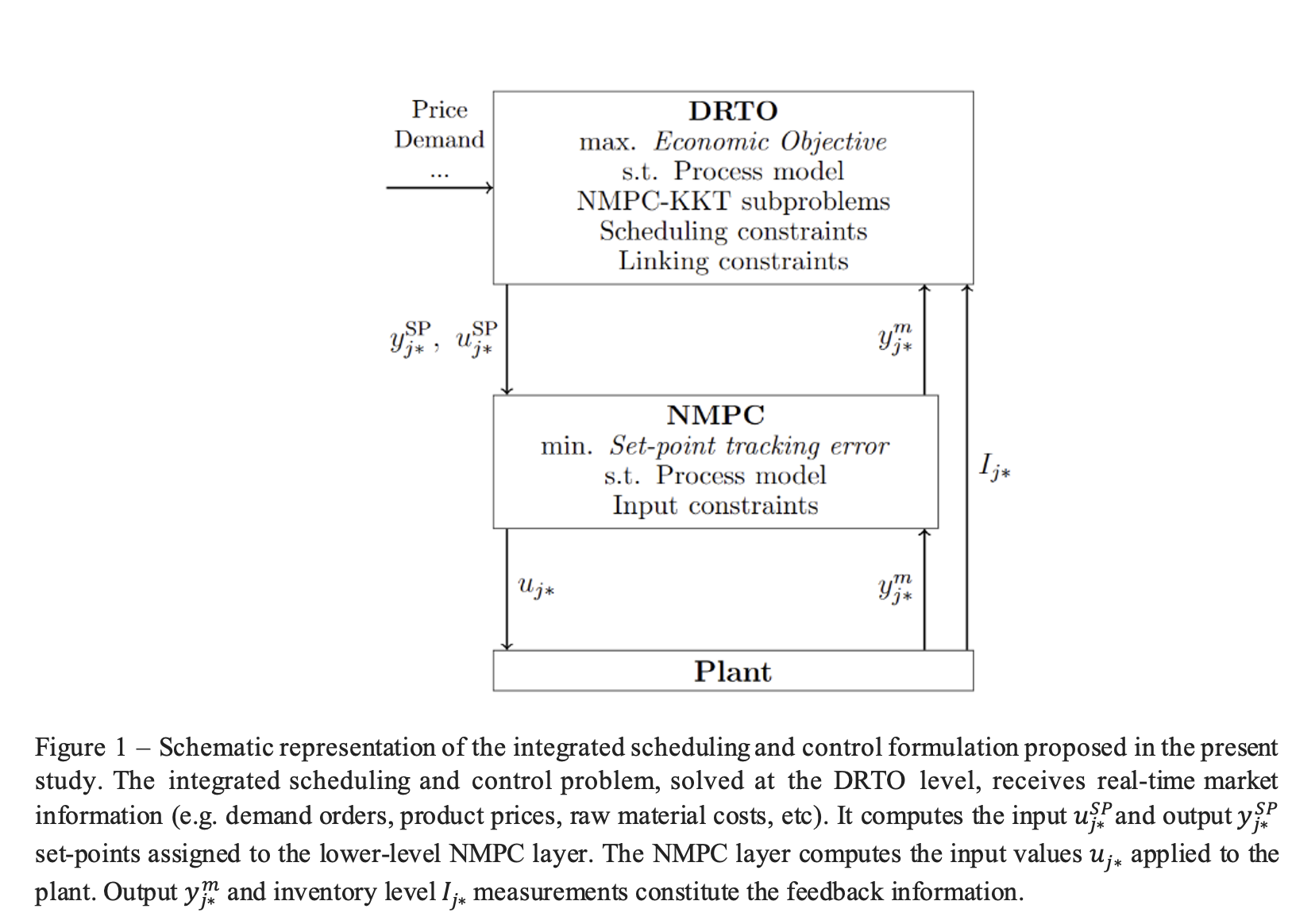
In this work, we propose a closed-loop integrated scheduling and control framework for processes controlled by NMPC. The integrated problem is solved at the dynamic-real time optimization (DRTO) level to compute set-points to the underlying NMPC control layer, which then computes the inputs applied to the plant. One of the main advantages of the proposed approach is that it maintains the NMPC architecture currently in place intact (i.e. no changes to the NMPC formulation are required). Another advantage is that the DRTO is aware of the NMPC controller. This prevents the DRTO from computing set-points that are unreachable and/or infeasible for the NMPC. A schematic diagram is presented in Figure 1. For this study, the DRTO is solved online at a pre-specified time-interval which is an integer multiple of the NMPC sampling time.
At the DRTO level, we use the NMPC first-order Karush-Kuhn-Tucker (KKT) conditions to compute the input action applied to the process model at every prediction time-step. This is represented in Figure 1 by the NMPC-KKT subproblems constraints. The Linking constraints ensure that the first piece of the input trajectory computed by NMPC-KKT subproblems is applied to the Process model, where the Process model is a mathematical representation of the plant dynamics (e.g. state-space model). The Scheduling constraints capture grade transitions, production sequencing, quality targets, and it also includes an inventory model. The quality targets are defined with respect to (a subset) of the (measured) outputs of the Process model (e.g. different product grades have different concentrations). The amount produced of each grade is determined as part of the solution of the DRTO problem. Note that the main degrees of freedom of the DRTO problem are the set-points to the NMPC-KKT subproblems, which impacts the Process model, and hence the Scheduling constraints, via the inputs. The DRTO receives output and inventory measurements from the plant, as well as market information regarding the demand and utilities cost. We use complementarity constraints to model discrete scheduling decisions. The scheduling and NMPC-KKT complementarities are addressed via a regularization approach [10] as part of the solution of the DRTO problem.
We demonstrate the performance of the proposed integrated scheduling and control framework on two nonlinear processes operated by an NMPC, a SIMO (single-input multiple-output) CSTR and a MIMO (multiple-input multiple-output) polymerization reactor. For both case studies, the proposed framework successfully drives the plant to meet the product demands, even under detuned controller conditions. Of note is that the DRTO utilizes the set-point trajectories to compensate for the detuned conditions. Additionally, for the case studies considered, we show that the NMPC-KKT conditions always yield a local minimum, and that the proposed complementarity formulation successfully approximates the discrete scheduling decisions.
REFERENCES
[1] Xenos, D.P., Noor, I.M., Matloubi, M., Cicciotti, M., Haugen, T. and Thornhill, N.F., 2016. Demand-side management and optimal operation of industrial electricity consumers: An example of an energy-intensive chemical plant. Applied Energy, 182, pp.418-433.
[2] Moura, Pedro S., and Anibal T. De Almeida. "The role of demand-side management in the grid integration of wind power." Applied Energy 87, no. 8 (2010): 2581-2588.
[3] Baldea, Michael, and Iiro Harjunkoski. "Integrated production scheduling and process control: A systematic review." Computers & Chemical Engineering 71 (2014): 377-390.
[4] Caspari, Adrian, Calvin Tsay, Adel Mhamdi, Michael Baldea, and Alexander Mitsos. "The integration of scheduling and control: Top-down vs. bottom-up." Journal of Process Control 91 (2020): 50-62.
[5] Simkoff, J. M., & Baldea, M. (2019). Production scheduling and linear MPC: Complete integration via complementarity conditions. Computers & Chemical Engineering, 125, 287-305.
[6] Remigio, Jerome EJ, and Christopher LE Swartz. "Production scheduling in dynamic real-time optimization with closed-loop prediction." Journal of Process Control 89 (2020): 95-107.
[7] Dias, Lisia S., Richard C. Pattison, Calvin Tsay, Michael Baldea, and Marianthi G. Ierapetritou. "A simulation-based optimization framework for integrating scheduling and model predictive control, and its application to air separation units." Computers & Chemical Engineering 113 (2018): 139-151.
[8] Qin, S. Joe, and Thomas A. Badgwell. "A survey of industrial model predictive control technology." Control engineering practice 11, no. 7 (2003): 733-764.
[9] Henson, M. A. (1998). Nonlinear model predictive control: current status and future directions. Computers & Chemical Engineering, 23(2), 187-202.
[10] Scholtes, Stefan. "Convergence properties of a regularization scheme for mathematical programs with complementarity constraints." SIAM Journal on Optimization 11, no. 4 (2001): 918-936.