2023 AIChE Annual Meeting
(377g) Fault-Prognostic Explicit Model Predictive Control with Physics-Data Driven Monitoring
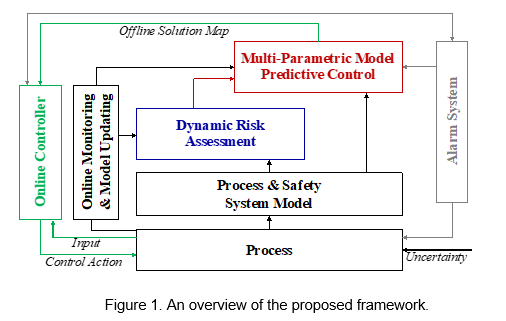
To meet these needs, we present a framework for dynamic risk monitoring, online model updating, and fault-prognostic control as shown in Figure 1. A physics-based statistical dynamic risk model [7] is adapted to quantify the impact on real-time failure probability and consequence severity, as a result of safety-critical process variable deviations from nominal operating conditions. A multi-parametric model predictive controller (mp-MPC) is then designed based on the process model and dynamic risk model [8]. The multi-parametric control laws can thus be derived offline in priori as piecewise affine functions of process states, outputs, risk, and disturbances [9]. During online operation, the controller will determine optimal control actions by looking up the mp-MPC solution map instead of repetitively carrying out dynamic optimization. This risk-aware mp-MPC also offers the advantage of dual-layer process safety management by explicitly: (i) accounting for operating bounds of state variables and risk values in path constraints, and (ii) controlling risk as an output variable. The mp-MPC moving horizon policy also enables fault prognosis into the next output horizon leveraging model-based risk propagation forecast, which will in turn affect the optimal control decision at the current time step to proactively avoid or mitigate fault probability. If however, a critical failure is predicted and there is no action that can avoid it, alarm systems can relay this so that emergency protocols begin well before failure occurs. Moreover, an online model updating system is developed and coupled with the control system which takes advantage of artificial neural network to historicize process data and use it to detect and correct any modeling uncertainties. We will also showcase the online model updating to address model approximation errors if linear mp-MPC is preferred. The potential and efficacy of this framework is demonstrated with a batch reactor case study of the incident that occurred at T2 laboratories in Florida, USA Dec. 2007. [10]
References
- Marsh, G. C., Mercer, O. W. & Companies, M. The 100 Largest Losses 1978-2017 Large property damage losses in the hydrocarbon industry. Marsh Report (2018).
- Lee, J., Cameron, I., & Hassall, M. (2019). Improving process safety: What roles for Digitalization and Industry 4.0?. Process safety and environmental protection, 132, 325-339.
- Villa, V., Paltrinieri, N., Khan, F. & Cozzani, V. Towards dynamic risk analysis: A review of the risk assessment approach and its limitations in the chemical process industry. Safety Science 89, 77â93 (2016).
- Leveson, N. G. & Stephanopoulos, G. A system-theoretic, control-inspired view and approach to process safety. AIChE Journal 60(1) (2014).
- Albalawi, F., Durand, H. & Christofides, P. D. Process operational safety via model predictive control: Recent results and future research directions. Computers & Chemical Engineering 114, 171â190 (2018).
- Venkidasalapathy, J. A. & Kravaris, C. Safety-centered process control design based on dynamic safe set. Journal of Loss Prevention in the Process Industries 65, 104126 (2020).
- Bao, H., Khan, F., Iqbal, T., & Chang, Y. (2011). Riskâbased fault diagnosis and safety management for process systems. Process Safety Progress, 30(1), 6-17.
- Pistikopoulos, E. N., Diangelakis, N. A., Oberdieck, R., Papathanasiou, M. M., Nascu, I., & Sun, M. PAROC â An integrated framework and software platform for the optimisation and advanced model-based control of process systems. Chemical Engineering Science, 136, 115-138 (2015).
- Ali, M., Cai, X., Khan, F., Pistikopoulos, E. N., & Tian, Y. Dynamic Risk-based Process Design and Operational Optimization via Multi-Parametric Programming. Under Review.
- Chemical Safety Board, T2 laboratories inc. reactive chemical explosion. https://www.csb.gov/t2-laboratories-inc-reactive-chemical-explosion/