2023 AIChE Annual Meeting
(491e) A Closed-Loop Integrated Scheduling and Control Formulation for Processes Controlled By Distributed MPC Systems
In recent years, open [5] and closed-loop [6,7,8] formulations have been proposed for the integrated scheduling and control problem. Closed-loop formulations either use a dynamic process model that is representative of the closed-loop plant behavior, or account for the controller action via an explicit or implicit control law. Open-loop formulations neglect the presence of the controller and consider the open-loop process response. Because of the popularity of model predictive control (MPC) [9], a number of studies have proposed integrated scheduling and control formulations for processes controlled by centralized MPC [7,8]. PI controllers have also been considered in some studies [6]. Distributed MPC systems, however, have received very little attention from the perspective of integration of scheduling and control. Nevertheless, distributed MPC is sometimes favored over a centralized MPC approach for reliability, maintenance, and computational purposes [10, 11].
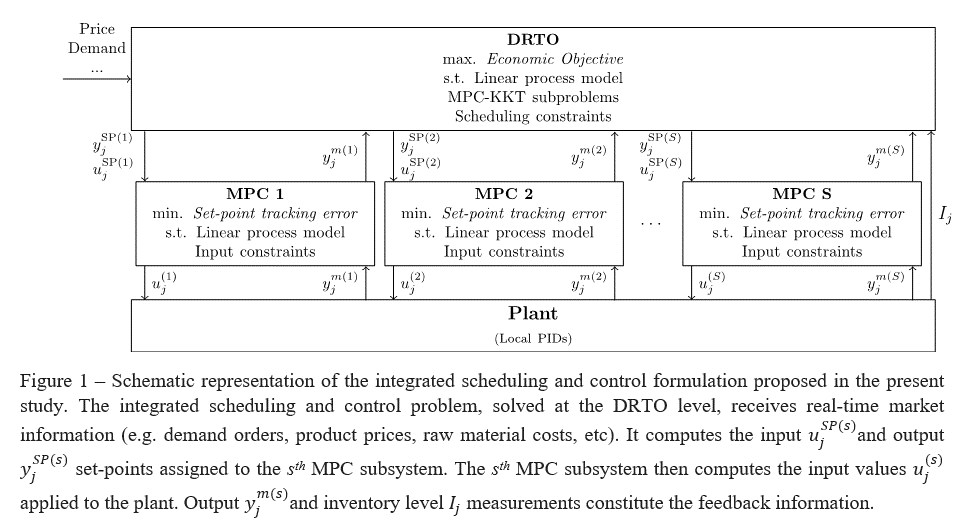
In this study, we propose an integrated scheduling and control formulation that accounts for the action of distributed MPC systems. Given that the integrated problem is an optimization problem and the MPC problem is also an optimization problem, this results in a multilevel optimization formulation with multiple MPC problems in the constraints. To solve this problem, we replace the MPC subproblems by their first-order Karush-Kuhn-Tucker (KKT) conditions which, for convex problems (e.g. linear MPC), are necessary and sufficient for optimality. This approach has been successfully adopted in a number of studies with [7,8,14] and without [12,13] scheduling considerations. In the present work, we use binary variables to capture discrete scheduling decisions, and to linearize the KKT-complementarity conditions. This leads to a mixed-integer linear programming (MILP) problem. The MPC-KKT reformulation, and scheduling constraints are linear, and we assume that a linear model coupled with a bias update mechanism is able to capture the true process dynamics sufficiently well. This closed-loop integrated scheduling and control problem is solved in real-time at the dynamic real-time optimization (DRTO) level to compute the input and output set-points assigned to the lower-level MPC systems. Production sequencing is also communicated to the plant via the set-points assigned to the MPCs. Due to that, one of the advantages of the proposed approach is that no changes are required to the existing control architecture (i.e. the MPC formulation is kept intact). A schematic representation of the integrated scheduling and control framework proposed in this study is presented in Figure 1.
We consider application of the proposed closed-loop integrated scheduling and control formulation to a process where two CSTRs are operated in parallel to meet the demand of distinct product grades. Each production line is assumed to be controlled by a distinct MPC subsystem. We investigate the economic gains and computational burden derived from accounting for the control action in the proposed formulation under closed-loop operation. Our results suggest that beyond a certain horizon, much shorter than the scheduling horizon, there is little economic benefit in rigorously accounting for the control action. We also observe a large variation in the time taken to solve the integrated scheduling and control problem, likely due to changes in the demand profile. However, the maximum observed solution times decrease sharply with the number of time-steps for which a rigorous approach is used to model the distributed MPC system action. In a second case study, we consider a nonlinear process. We show that the proposed formulation with a linear process model (i.e. there is plant-model mismatch) is able to drive the nonlinear plant to meet the quality specifications of three different product grades even before steady-state operation is reached. The proposed framework also adjusts the operating conditions based on the raw material costs.
In conclusion, we propose a closed-loop integrated scheduling and control formulation for plants operated by distributed MPC systems, and demonstrate its performance under conditions of perfect model knowledge and plant-model mismatch. We show that the proposed framework can coordinate the MPC subsystems and also drive the plant to produce product that meets the quality specifications before steady-state operation is reached. The ability to produce valuable product during transient periods has the potential to largely decrease operating costs, and may be essential for efficient market driven operation of processes with large time constants.
REFERENCES
[1] Backx, Ton, Okko Bosgra, and Wolfgang Marquardt. "Integration of model predictive control and optimization of processes: enabling technology for market driven process operation." IFAC Proceedings Volumes 33, no. 10 (2000): 249-260.
[2] Xenos, D.P., Noor, I.M., Matloubi, M., Cicciotti, M., Haugen, T. and Thornhill, N.F., 2016. Demand-side management and optimal operation of industrial electricity consumers: An example of an energy-intensive chemical plant. Applied Energy, 182, pp.418-433.
[3] Baldea, Michael, and Iiro Harjunkoski. "Integrated production scheduling and process control: A systematic review." Computers & Chemical Engineering 71 (2014): 377-390.
[4] Caspari, Adrian, Calvin Tsay, Adel Mhamdi, Michael Baldea, and Alexander Mitsos. "The integration of scheduling and control: Top-down vs. bottom-up." Journal of Process Control 91 (2020): 50-62.
[5] Flores-Tlacuahuac, Antonio, and Ignacio E. Grossmann. "Simultaneous cyclic scheduling and control of a multiproduct CSTR." Industrial & engineering chemistry research 45, no. 20 (2006): 6698-6712.
[6] Chu, Yunfei, and Fengqi You. "Integration of scheduling and control with online closed-loop implementation: Fast computational strategy and large-scale global optimization algorithm." Computers & Chemical Engineering 47 (2012): 248-268.
[7] Simkoff, J. M., & Baldea, M. (2019). Production scheduling and linear MPC: Complete integration via complementarity conditions. Computers & Chemical Engineering, 125, 287-305.
[8] Remigio, Jerome EJ, and Christopher LE Swartz. "Production scheduling in dynamic real-time optimization with closed-loop prediction." Journal of Process Control 89 (2020): 95-107.
[9] Qin, S. Joe, and Thomas A. Badgwell. "A survey of industrial model predictive control technology." Control engineering practice 11, no. 7 (2003): 733-764.
[10] Scattolini, Riccardo. "Architectures for distributed and hierarchical model predictive controlâa review." Journal of process control 19, no. 5 (2009): 723-731.
[11] Pannocchia, Gabriele. "Distributed Model Predictive Control." In: Baillieul, John, and Tariq Samad, eds. Encyclopedia of systems and control. Cham: Springer London, (2015): 301-308.
[12] Jamaludin, Mohammad Zamry, and Christopher LE Swartz. "Dynamic realâtime optimization with closedâloop prediction." AIChE Journal 63, no. 9 (2017): 3896-3911.
[13] Li, Hao, and Christopher LE Swartz. "Dynamic real-time optimization of distributed MPC systems using rigorous closed-loop prediction." Computers & Chemical Engineering 122 (2019): 356-371.
[14] Dering, Daniela, and Christopher LE Swartz. "A stochastic optimization framework for integrated scheduling and control under demand uncertainty." Computers & Chemical Engineering 165 (2022): 107931.